এই পোস্টে আমরা একটি উচ্চ বর্তমান সেন্সরবিহীন বিএলডিসি মোটর কন্ট্রোলার সার্কিট নিয়ে আলোচনা করব যা ক্রিয়াকলাপ শুরুর জন্য হল এফেক্ট সেন্সরগুলির উপর নির্ভর করে না বরং ক্রমযুক্ত ইনপুটটির জন্য মোটর থেকে পিছনের ইএমএফ ব্যবহার করে
ওভারভিউ
সঠিক পরিবহণের জন্য বেশিরভাগ 3-পর্যায়ের বিএলডিসি ড্রাইভার সার্কিটগুলি সেন্সর ভিত্তিক প্রতিক্রিয়া বা বহিরাগত 3-ফেজ সিঙ্ক সিগন্যালের উপর নির্ভর করে, এর বিপরীতে আমাদের বর্তমান সংবেদকহীন উচ্চ শক্তি বিএলডিসি মোটর কন্ট্রোলার সার্কিট সেন্সর বা কোনও বহিরাগত সংকেতের উপর নির্ভর করে না অপারেটিংয়ের জন্য মোটর, বরং খুব সহজেই মোটরটিতে প্রয়োজনীয় শক্তিশালী সিঙ্ক্রোনাইজড রোটাল এফেক্ট উত্পাদন করতে মোটর ওয়াইন্ডিং থেকে পিছনের ইএমএফগুলি প্রসেস করে।
আমাদের বর্তমান ধারণার দিকে ফিরে এসে, সার্কিটটি ফেয়ারচাইল্ড থেকে আইসি এমএল 4425 নিয়োগ করেছে এবং মোটর সেন্সর রয়েছে কিনা তা নির্বিশেষে আমাদের যে কোনও প্রকারের বিএলডিসি মোটর পরিচালনা করতে সক্ষম করে।
বেশিরভাগ বিএলডিসির মোটর আজ অন্তর্নির্মিত হল এফেক্ট সেন্সর যা স্টেটর উইন্ডিংয়ের বিষয়ে চৌম্বকীয় রটারের তাত্ক্ষণিক অবস্থান সম্পর্কিত নিয়ামক সার্কিটকে প্রয়োজনীয় প্রতিক্রিয়া সরবরাহ করে এবং যখন প্রাসঙ্গিক পাওয়ার ডিভাইসগুলি সুনির্দিষ্ট ক্রম দিয়ে ট্রিগার করা প্রয়োজন তখন নিয়ামককে অবহিত করে, এর ফলে মোটরটি ঘুরতে দেয় নিখুঁত সিঙ্ক্রোনাইজেশন এবং সর্বাধিক দক্ষতা।
সেন্সর ছাড়াই কাজ করা
কিছু বিএলডিসি মোটর সেন্সর ছাড়াই থাকতে পারে এবং এ জাতীয় মোটরগুলির জন্য বিএলডিসি নিয়ামক মোটরের প্রয়োজনীয় সিঙ্ক্রোনাইজড রোটেশনের জন্য একটি বাহ্যিক 3 ফেজ জেনারেটর সার্কিট নিয়োগ করতে বাধ্য হয়।
তবে বর্তমান 3 ফেজ সেন্সরবিহীন বিএলডিসি নিয়ামক এই সমস্ত ঝামেলা দূর করে এবং সেন্সর বা কোনও বাহ্যিক ট্রিগার কোনওর উপর নির্ভর করে না, এর পরিবর্তে সিস্টেমটি বিএলডিসি মোটরের স্টেটর কয়েল থেকে পিছনের ইএমএফ ডালগুলি কার্যকর করে সংযুক্ত মোটরে ঘূর্ণন গতি ।
এই বৈশিষ্ট্যটি সেন্সর সংযোগ বা বহিরাগত 3 ফেজ জেনারেটর পর্যায়ে জটিলতার মধ্যে না গিয়ে নিয়ন্ত্রককে সব ধরণের বিএলডিসি মোটর জন্য সর্বজনীনভাবে ব্যবহারের অনুমতি দেয়।
তবুও পূর্ণ সেতু সার্কিট পাওয়ার ডিভাইসগুলি বাহ্যিকভাবে কনফিগার করা আছে সিস্টেমটিকে কোনও উচ্চতর বিএলডিসি মোটর যাবতীয় কোনও বিধিনিষেধ ছাড়াই ব্যবহার করার অনুমতি দেয়। কেউ প্রয়োজন অনুসারে পাওয়ার ডিভাইসের রেটিং পরিবর্তন করতে পারে এবং পছন্দ অনুযায়ী উচ্চতর বর্তমান বিএলডিসি অপারেশন অর্জন করতে পারে।
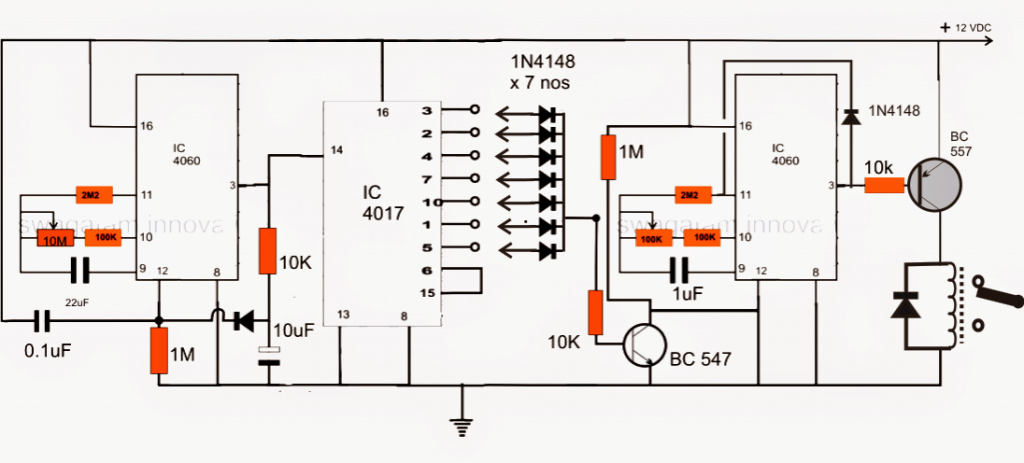
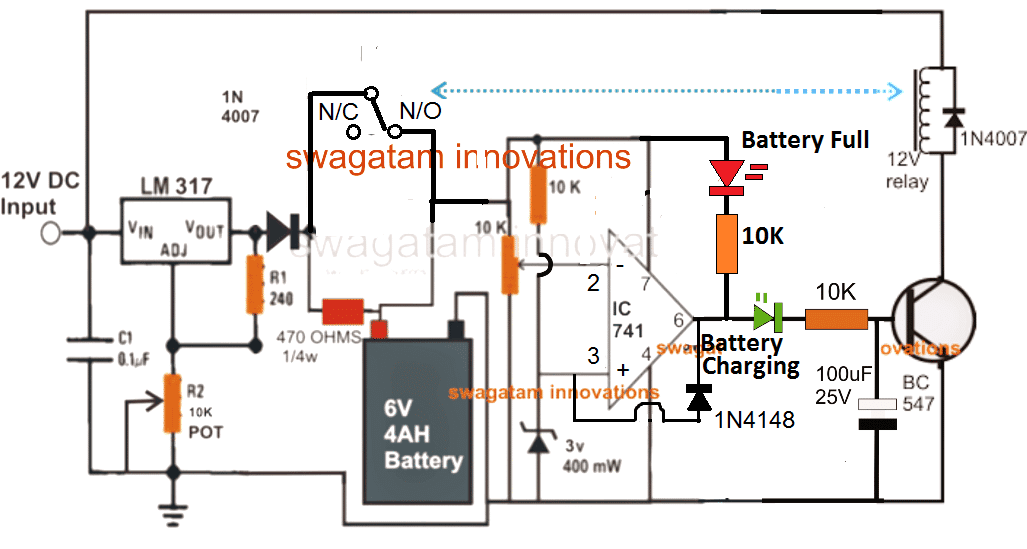
নিম্নলিখিত চিত্রটি ট্রিগার উত্স হিসাবে ব্যাক EMF ব্যবহার করে প্রস্তাবিত সেন্সরলেস বিএলডিসি নিয়ন্ত্রকের সম্পূর্ণ নকশা বিন্যাস দেখায়।
সার্কিটের বর্ণনা

সিস্টেমটি বেশ সোজা দেখায়, আপনাকে কেবল দেখানো উপাদানগুলি সোল্ডার করতে হবে এবং দ্রুত বিএলডিসি কার্যক্রম শুরু করতে হবে। এটি পাওয়ার স্যুইচ করা এবং বিএলডিসি মোটর সম্পূর্ণ দক্ষতার সাথে ঘোরানো দেখার মতো সহজ।
নিয়ন্ত্রণগুলি বুঝতে এবং বাস্তবায়ন করাও খুব সহজ, আরএন / ব্রাক সুইচটি মোটর চালানো চালিয়ে যেতে সক্ষম করে ততক্ষণ স্যুইচটি বন্ধ অবস্থায় থাকে না বা গ্রাউন্ড হয় না, যখন স্যুইচটি টগল করার সাথে সাথে মোটর তাত্ক্ষণিক বন্ধ হয়ে যায় while স্থল স্তরে.পট আর 18 টি ব্যবহারকারীকে নির্দিষ্ট পরিসীমা জুড়ে কেবল পট গাঁটকে সরানোর মাধ্যমে লিনিয়ার মোটরটির গতি নিয়ন্ত্রণ করতে দেয়।
প্রধান সুবিধা
এই 3-ফেজ সেন্সরবিহীন বিএলডিসি নিয়ন্ত্রকের সবচেয়ে বড় সুবিধা হ'ল এটির মোটর থেকে অগোছালো সেন্সর ভিত্তিক ফিডব্যাকগুলি প্রয়োজন হয় না, বাহ্যিক উত্স থেকে 3-ফেজ সিঙ্ক সিগন্যালের উপরও নির্ভর করে না। উপরের চিত্রটিতে যেমন প্রত্যক্ষ করা যায়, মোটামোটির প্রধান 3 ফেজ অপারেটিং তারগুলি থেকে আর 8 / আর 9 / আর 10 এর মাধ্যমে আইসির নির্ধারিত পিনআউটে প্রতিক্রিয়া পাওয়া যায়।
এটি নিয়ামককে সেন্সর পাওয়া যায় কিনা তা সব ধরণের বিএলডিসি মোটর সহ ব্যবহার করতে দেয়। যদি কোনও বিএলডিসি থেকে সেন্সর উপলব্ধ থাকে তবে সেগুলি উপেক্ষা করা যেতে পারে এবং মোটরটি সেন্সর তারগুলি ব্যতীত কনফিগার করা যেতে পারে, যেমন উপরের চিত্রটিতে নির্দেশিত হয়েছে।
পূর্ববর্তী: ওয়্যারলেস সার্ভো মোটর নিয়ন্ত্রণ 2.4 গিগাহার্টজ যোগাযোগ লিঙ্কটি ব্যবহার করে পরবর্তী: বিএলডিসি মোটর ব্যবহার করে বৈদ্যুতিক হুইলচেয়ার