
সংজ্ঞা
ব্রাশহীন ডিসি মোটর পলিফেজ আর্মচার উইন্ডিংয়ের আকারে একটি স্থায়ী চৌম্বক এবং স্টেটর আকারে একটি রটার নিয়ে থাকে consists এটি প্রচলিত ডিসি মোটর থেকে পৃথক হয় যে এটিতে ব্রাশ থাকে না এবং স্টেটর উইন্ডিংগুলি খাওয়ানোর জন্য একটি বৈদ্যুতিন ড্রাইভ ব্যবহার করে বৈদ্যুতিকভাবে যাতায়াত করা হয়।
মূলত একটি বিএলডিসি মোটর দুটি উপায়ে তৈরি করা যেতে পারে- কোরটির বাইরে রটার এবং কোরের উইন্ডিংগুলি রেখে এবং অন্যটি মূলটির বাইরে উইন্ডিং রেখে। পূর্ববর্তী বিন্যাসে, রটার চৌম্বকগুলি একটি অন্তরক হিসাবে কাজ করে এবং মোটর থেকে তাপ অপচয় হ্রাসের হার হ্রাস করে এবং কম স্রোতে পরিচালিত হয়। এটি সাধারণত ভক্তদের মধ্যে ব্যবহৃত হয়। উত্তরোত্তর বিন্যাসে মোটর আরও বেশি তাপ ছড়িয়ে দেয়, ফলে এটি তার ঘূর্ণন সারণী বৃদ্ধি করে। এটি হার্ড ডিস্ক ড্রাইভে ব্যবহৃত হয়।

বিএলডিসি
4 মেরু 2 ফেজ মোটর অপারেশন
ব্রাশহীন ডিসি মোটরটি একটি বৈদ্যুতিন ড্রাইভ দ্বারা চালিত হয় যা রটারটি ঘুরিয়ে দেওয়ার সাথে সাথে স্টেটর উইন্ডিংয়ের মধ্যে সরবরাহের ভোল্টেজটি স্যুইচ করে। রোটার অবস্থানটি ট্রান্সডুসার (অপটিক্যাল বা চৌম্বক) দ্বারা পর্যবেক্ষণ করা হয় যা বৈদ্যুতিন নিয়ামককে তথ্য সরবরাহ করে এবং এই অবস্থানের উপর ভিত্তি করে, স্ট্যাটারকে ঘোরানো হবে তা নির্ধারিত হয়। এই বৈদ্যুতিন ড্রাইভটিতে ট্রানজিস্টর রয়েছে (প্রতিটি পর্বের জন্য ২) যা একটি মাইক্রোপ্রসেসরের মাধ্যমে পরিচালিত হয়।

বিএলডিসি-ডিসি
স্থায়ী চৌম্বক দ্বারা উত্পাদিত চৌম্বকীয় ক্ষেত্রটি স্টেটর উইন্ডিংয়ে কারেন্ট দ্বারা প্রেরিত ক্ষেত্রের সাথে যোগাযোগ করে, একটি যান্ত্রিক টর্ক তৈরি করে। বৈদ্যুতিন স্যুইচিং সার্কিট বা ড্রাইভ স্টেটারে সরবরাহের বর্তমানকে স্যুইচ করে যাতে ইন্টারেক্টিভ ক্ষেত্রগুলির মধ্যে 0 থেকে 90 ডিগ্রি পর্যন্ত ধ্রুবক কোণ বজায় রাখে। হল সেন্সরগুলি বেশিরভাগ স্ট্যাটারে বা রটারে লাগানো থাকে। যখন রটারটি উত্তর বা দক্ষিণ মেরুর উপর ভিত্তি করে হল সেন্সরটির মধ্য দিয়ে যায় তখন এটি একটি উচ্চ বা নিম্ন সংকেত উত্পন্ন করে। এই সংকেতগুলির সংমিশ্রণের উপর ভিত্তি করে, জোরদার হওয়ার জন্য বাঁকটি সংজ্ঞায়িত করা হয়। মোটরটি চলমান রাখার জন্য, উইন্ডিং দ্বারা উত্পাদিত চৌম্বক ক্ষেত্রের অবস্থানটি স্থানান্তরিত হওয়া উচিত, কারণ রোটার স্টেটর ক্ষেত্রটি ধরে রাখতে চলে moves

সার্কিট
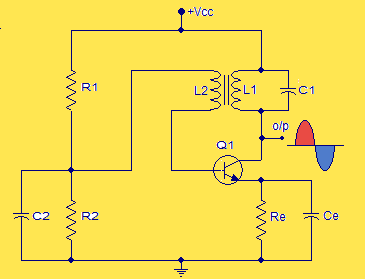
একটি 4 মেরুতে, 2 ফেজ ব্রাশহীন ডিসি মোটরটিতে একটি একক হল সেন্সর ব্যবহার করা হয়, যা স্টেটারে এমবেড করা থাকে। রটারটি ঘোরার সাথে সাথে হল সেন্সরটি অবস্থানটি অনুধাবন করে এবং চুম্বকের (উত্তর বা দক্ষিণ) মেরুর উপর নির্ভর করে একটি উচ্চ বা নিম্ন সংকেত বিকাশ করে। হলের সেন্সরটি একটি রেজিস্টরের মাধ্যমে ট্রানজিস্টরের সাথে সংযুক্ত থাকে। সেন্সরের আউটপুটে যখন উচ্চ ভোল্টেজ সংকেত দেখা দেয়, তখন কয়েল এ-তে সংযুক্ত ট্রানজিস্টর সঞ্চালন শুরু করে, প্রবাহের স্রোতের জন্য পথ সরবরাহ করে এবং এইভাবে কয়েলকে শক্তিশালী করে। ক্যাপাসিটর সম্পূর্ণ সরবরাহের ভোল্টেজকে চার্জ করা শুরু করে। যখন হল সেন্সরটি রটারের মেরুতে পরিবর্তন পরিবর্তন সনাক্ত করে, এটি তার আউটপুটে একটি কম ভোল্টেজ সংকেত বিকাশ করে এবং যেহেতু ট্রানজিস্টর 1 কোনও সরবরাহ পায় না, এটি কাটার অফ অবস্থায় রয়েছে। ক্যাপাসিটরের চারপাশে বিকশিত ভোল্টেজটি ভিসি, যা 2 এর সরবরাহ ভোল্টেজএনডিট্রানজিস্টর, এবং কয়েল বি এখন উত্সাহিত হয়, বর্তমান এটির মধ্য দিয়ে যায়।
বিএলডিসি মোটরগুলিতে স্থায়ী চৌম্বকগুলি স্থির থাকে, যা ঘূর্ণায়মান এবং একটি স্থির আর্ম্যাচার করে, চলমান আর্ম্যাচারের সাথে কারেন্টের সংযোগ স্থাপনের সমস্যাগুলি দূর করে। এবং সম্ভবত স্টোর বা অনিচ্ছাকৃত মোটরগুলির চেয়ে রটারে আরও বেশি খুঁটি। পরবর্তীকালে স্থায়ী চৌম্বকবিহীন হতে পারে, কেবলমাত্র খুঁটি যা রটারের দ্বারা প্ররোচিত হয় তারপরে সময়সী স্ট্যাটার উইন্ডিংয়ের মাধ্যমে একটি ব্যবস্থায় টান হয়। একটি বৈদ্যুতিন নিয়ামক ব্রাশ / ব্রাশ করা ডিসি মোটরটির যাত্রী সমাবেশকে প্রতিস্থাপন করে, যা মোটর ঘুরিয়ে রাখার জন্য ক্রমাগত উইন্ডিংয়ে ফেজটি স্যুইচ করে। নিয়ামক ব্রাশ / যাত্রী সিস্টেমের পরিবর্তে সলিড-স্টেট সার্কিট ব্যবহার করে তুলনামূলক সময়সীমার পাওয়ার বিতরণ সম্পাদন করে।

বিএলডিসি মোটর
ব্রাশহীন ডিসি মোটরগুলির 7 সুবিধা
- আরও ভাল গতি বনাম টর্ক বৈশিষ্ট্য
- উচ্চ গতিশীল প্রতিক্রিয়া
- উচ্চতর দক্ষতা
- বৈদ্যুতিক এবং ঘর্ষণ ক্ষতির অভাবে দীর্ঘ অপারেটিং জীবন
- শব্দহীন অপারেশন
- উচ্চ গতির ব্যাপ্তি
অ্যাপ্লিকেশন:
উপকরণ এবং ডিজাইনের অগ্রগতির কারণে ব্রাশলেস ডিসি মোটরের দাম উপস্থাপনের পরে থেকে হ্রাস পেয়েছে। এই ব্রাশ ডিসি মোটরকে কেন্দ্র করে প্রচুর ফোকাল পয়েন্টের সাথে মিলিয়ে খরচে এই হ্রাস, ব্রাশলেস ডিসি মোটরকে বিভিন্ন স্বতন্ত্র অ্যাপ্লিকেশনগুলির একটি জনপ্রিয় উপাদান হিসাবে তৈরি করে। বিএলডিসি মোটর ব্যবহার করে এমন অ্যাপ্লিকেশনগুলির মধ্যে অন্তর্ভুক্ত রয়েছে তবে তা সীমাবদ্ধ নয়:
- ভোক্তা ইলেকট্রনিক্স
- পরিবহন
- তাপ এবং বায়ুচলাচল
- শিল্প প্রকৌশল
- মডেল ইঞ্জিনিয়ারিং
কাজের মূলনীতি
বিএলডিসি মোটরগুলির কাজ করার জন্য নীতিগুলি ব্রাশযুক্ত ডিসি মোটর হিসাবে একই, যেমন অভ্যন্তরীণ খাদ অবস্থান প্রতিক্রিয়া। ব্রাশযুক্ত ডিসি মোটরের ক্ষেত্রে, যান্ত্রিক পরিবহন এবং ব্রাশ ব্যবহার করে প্রতিক্রিয়া প্রয়োগ করা হয়। বিএলডিসি মোটরের মধ্যে এটি একাধিক প্রতিক্রিয়া সেন্সর ব্যবহার করে অর্জিত হয়। বিএলডিসি মোটরগুলিতে আমরা বেশিরভাগ হল-এফেক্ট সেন্সর ব্যবহার করি, যখনই রটার চৌম্বকীয় খুঁটিগুলি হলের সেন্সরের কাছাকাছি চলে যায়, তারা একটি উচ্চ বা নিম্ন স্তরের সিগন্যাল তৈরি করে, যা শ্যাফটের অবস্থান নির্ধারণ করতে ব্যবহার করা যেতে পারে। চৌম্বকীয় ক্ষেত্রের দিকটি যদি বিপরীত হয় তবে বিকাশকৃত ভোল্টেজও বিপরীত হবে।
একটি বিএলডিসি মোটর নিয়ন্ত্রণ করছে
কন্ট্রোল ইউনিটটি মাইক্রো ইলেক্ট্রনিক দ্বারা প্রয়োগ করা হয় কয়েকটি উচ্চ প্রযুক্তির পছন্দ রয়েছে। এটি কোনও মাইক্রো-কন্ট্রোলার, একটি ডেডিকেটেড মাইক্রো-কন্ট্রোলার, একটি হার্ড-ওয়্যার্ড মাইক্রো ইলেক্ট্রনিক ইউনিট, পিএলসি বা অনুরূপ অন্য একটি ইউনিট ব্যবহার করে প্রয়োগ করা যেতে পারে।
অ্যানালগ নিয়ামকটি এখনও ব্যবহার করছে, তবে প্রতিক্রিয়া বার্তাগুলি প্রক্রিয়া করতে পারে না এবং সেই অনুযায়ী নিয়ন্ত্রণ করতে পারে। এই ধরণের নিয়ন্ত্রণ সার্কিটের সাহায্যে উচ্চ-কর্মক্ষমতা নিয়ন্ত্রণ অ্যালগরিদমগুলি যেমন ভেক্টর নিয়ন্ত্রণ, ক্ষেত্র-ভিত্তিক নিয়ন্ত্রণ, উচ্চ-গতি নিয়ন্ত্রণ ইত্যাদি সমস্ত কিছুই মোটরের বৈদ্যুতিন চৌম্বকীয় অবস্থার সাথে সম্পর্কিত বাস্তবায়ন সম্ভব। অধিকতর গতিশীলতার প্রয়োজনীয়তার জন্য বাইরের লুপ নিয়ন্ত্রণ যেমন স্লাইডিং মোটর নিয়ন্ত্রণ, অভিযোজক নিয়ন্ত্রণ, ভবিষ্যদ্বাণীমূলক নিয়ন্ত্রণ… ইত্যাদি প্রচলিতভাবে প্রয়োগ করা হয়।
এগুলি ছাড়াও, আমরা উচ্চ-পারফরম্যান্স পিআইসি (পাওয়ার ইন্টিগ্রেটেড সার্কিট), এএসআইসি (অ্যাপ্লিকেশন নির্দিষ্ট ইন্টিগ্রেটেড সার্কিট)… ইত্যাদি পাই। যা নিয়ন্ত্রণ এবং পাওয়ার ইলেকট্রনিক ইউনিট উভয়কেই ব্যাপকভাবে সরল করতে পারে। উদাহরণস্বরূপ, আজ আমাদের কাছে একক আই সি-তে সম্পূর্ণ পিডব্লিউএম (পালস প্রস্থ মডারেশন) নিয়ন্ত্রক রয়েছে যা কিছু সিস্টেমে পুরো নিয়ন্ত্রণ ইউনিটকে প্রতিস্থাপন করতে পারে। যৌগিক ড্রাইভার আইসি একটি তিন-পর্বের কনভার্টারে সমস্ত ছয়টি পাওয়ার স্যুইচ ড্রাইভিংয়ের সম্পূর্ণ সমাধান সরবরাহ করতে পারে। দিনে দিনে আরও বেশি সংখ্যক সংখ্যক অনুরূপ সংহত সার্কিট রয়েছে। দিন শেষে, সিস্টেম অ্যাসেম্বলি সম্ভবত সমস্ত হার্ডওয়্যার সঠিক আকার এবং ফর্ম আসার সাথে নিয়ন্ত্রণ কন্ট্রোল সফ্টওয়্যার একটি টুকরা সম্ভবত জড়িত থাকবে।
পিডাব্লুএম (পালস প্রস্থের মড্যুলেশন) তরঙ্গ মোটরের গতি নিয়ন্ত্রণ করতে ব্যবহার করা যেতে পারে। এখানে গড় ভোল্টেজ দেওয়া হয়েছে বা মোটরটির মধ্য দিয়ে প্রবাহিত গড় স্রোত মোটরটির গতি নিয়ন্ত্রণকারী ডালের সময় এবং বন্ধ সময়ের উপর নির্ভর করে পরিবর্তিত হবে the তরঙ্গের শুল্ক চক্রটি তার গতি নিয়ন্ত্রণ করে। দায়িত্ব চক্র পরিবর্তন করার সময় (ওএন টাইম), আমরা গতি পরিবর্তন করতে পারি। আউটপুট পোর্টগুলি বিনিময় করে, এটি কার্যকরভাবে মোটরের দিক পরিবর্তন করবে।
গতি নিয়ন্ত্রণ
বিএলডিসি মোটরের গতির নিয়ন্ত্রণ পছন্দসই হারে মোটরকে কাজ করার জন্য প্রয়োজনীয়। ইনপুট ডিসি ভোল্টেজ নিয়ন্ত্রণ করে ব্রাশহীন ডিসি মোটরের গতি নিয়ন্ত্রণ করা যায়। ভোল্টেজ যত বেশি তত গতি তত বেশি। মোটর যখন স্বাভাবিক মোডে কাজ করে বা রেটেড গতির নীচে চলে তখন পিডব্লুএম মডেলের মাধ্যমে আরমেচারের ইনপুট ভোল্টেজ পরিবর্তন করা হয়। যখন কোনও মোটর রেট করা গতির উপরে পরিচালিত হয়, প্রবাহিত প্রবাহকে অগ্রসর করার মাধ্যমে ফ্লাক্স দুর্বল হয়ে যায়।
স্পিড কন্ট্রোল ক্লোজ-লুপ বা ওপেন-লুপ স্পিড কন্ট্রোল হতে পারে।
ওপেন লুপ স্পিড কন্ট্রোল - এটি কেবল ডিসি ভোল্টেজ কেটে মোটর টার্মিনালগুলিতে প্রয়োগ করা ডিসি ভোল্টেজ নিয়ন্ত্রণ করা জড়িত। যাইহোক, এটি বর্তমান সীমাবদ্ধতার কিছু আকারে ফলাফল।
বন্ধ লুপ গতি নিয়ন্ত্রণ - এটি মোটর থেকে গতি প্রতিক্রিয়া মাধ্যমে ইনপুট সরবরাহ ভোল্টেজ নিয়ন্ত্রণ জড়িত। সুতরাং সরবরাহের ভোল্টেজ ত্রুটি সংকেতের উপর নির্ভর করে নিয়ন্ত্রিত হয়।
ক্লোজড লুপের গতি নিয়ন্ত্রণে তিনটি মূল উপাদান থাকে।
- প্রয়োজনীয় পিডব্লিউএম ডাল উত্পন্ন করার জন্য একটি পিডাব্লুএম সার্কিট। এটি মাইক্রোকন্ট্রোলার বা টাইমার আইসি হতে পারে।
- আসল মোটরের গতি বোঝার জন্য একটি সংবেদনশীল ডিভাইস। এটি হল ইফেক্ট সেন্সর, একটি ইনফ্রারেড সেন্সর বা একটি অপটিক্যাল এনকোডার হতে পারে।
- মোটর অপারেশন নিয়ন্ত্রণ করতে একটি মোটর ড্রাইভ।
ত্রুটি সংকেতের ভিত্তিতে সরবরাহের ভোল্টেজ পরিবর্তনের এই কৌশলটি পিড নিয়ন্ত্রণকারী কৌশল বা ফাজি যুক্তি ব্যবহারের মাধ্যমে হতে পারে।
ব্রাশলেস ডিসি মোটরের গতি নিয়ন্ত্রণের জন্য অ্যাপ্লিকেশন

বিএলডিসি ডিসি মোটর নিয়ন্ত্রণ
মোটর অপারেশনটি একটি অপটোকললার এবং এমওএসএফইটি বিন্যাস ব্যবহার করে নিয়ন্ত্রণ করা হয়, যেখানে ইনপুট ডিসি শক্তি মাইক্রোকন্ট্রোলার থেকে পিডাব্লুএম কৌশল দ্বারা নিয়ন্ত্রিত হয়। মোটরটি ঘোরার সাথে সাথে এর খাদে ইনফ্রারেড নেতৃত্বে উপস্থিত তার শ্যাফে একটি সাদা স্পট উপস্থিতির কারণে সাদা আলোতে আলোকিত হয় এবং ইনফ্রারেড আলো প্রতিবিম্বিত করে। ফোটোডিওড এই ইনফ্রারেড আলো গ্রহণ করে এবং এর প্রতিরোধের পরিবর্তনের মধ্য দিয়ে যায়, এইভাবে সংযুক্ত ট্রানজিস্টারে সরবরাহের ভোল্টেজের পরিবর্তন ঘটায় এবং প্রতি মিনিটে ঘূর্ণনের সংখ্যা তৈরি করতে মাইক্রোকন্ট্রোলারকে একটি ডাল দেওয়া হয়। এই গতিটি এলসিডিতে প্রদর্শিত হয়।
প্রয়োজনীয় গতিটি মাইক্রোকন্ট্রোলারের ইন্টারফেসে কিপ্যাডে প্রবেশ করা হয়। সংবেদিত গতি এবং কাঙ্ক্ষিত গতির মধ্যে পার্থক্য হ'ল ত্রুটি সংকেত এবং মাইক্রোকন্ট্রোলার ত্রুটি সংকেত অনুযায়ী পিডাব্লুএম সংকেত উত্পন্ন করে, মোটরটিতে ডিসি পাওয়ার ইনপুট দেওয়ার জন্য अस्पष्ट যুক্তির ভিত্তিতে।
এইভাবে ক্লোড-লুপ নিয়ন্ত্রণ ব্যবহার করে ব্রাশহীন ডিসি মোটরের গতি নিয়ন্ত্রণ করা যায় এবং এটি যে কোনও পছন্দসই গতিতে ঘোরানো যায়।
ছবি স্বত্ব:
- বিএলডিসি দ্বারা এনএমবিটিসি
- বিএলডিসি-ডিসি বাই পিসিভেন




{kind=link}