আধুনিক বিশ্বে, রোবট একটি গুরুত্বপূর্ণ ভূমিকা পালন করবে । রোবোটের মূল উদ্দেশ্য হ'ল জনশক্তি হ্রাস করা। রোবটগুলি অনেক অ্যাপ্লিকেশনগুলিতে ইলেকট্রনিক্সে ব্যবহৃত হয়। এই নিবন্ধে আমরা কীভাবে আরডুইনো মডিউল এবং 8051 মাইক্রোকন্ট্রোলার দিয়ে একটি রোবট তৈরি করবেন সে সম্পর্কে আলোচনা করেছি। আরডুইনো দিয়ে একটি রোবট তৈরি করতে আমরা বাধা পরিহারের সাথে আরডুইনো রোবট সম্পর্কে ব্যাখ্যা করছি। প্রয়োজনীয় উপাদানগুলির মধ্যে রয়েছে রোবট বডি, ডিসি মোটর, আল্ট্রাসোনিক সেন্সর, আরডুইনো মডিউল, মোটর ড্রাইভার আইসি এবং আরডুইনো মডিউল
কিভাবে একটি রোবট তৈরি করবেন?
দ্য প্রয়োজনীয় উপাদান রোবট তৈরি করতে নিম্নলিখিতটি অন্তর্ভুক্ত করে
রোবট বডি
এর প্রাথমিক রোবট বডি ot বাধা এড়ানোর রোবট নিম্নলিখিত ছবিতে প্রদর্শিত হয়। রোবট বডি একটি প্লাস্টিকের দেহ এবং এতে উভয় পক্ষেই চাকা থাকে। রোবট বডিটির সামনে আল্ট্রাসোনিক সেন্সর সাজানো হয়েছে। অতিস্বনক সেন্সর ব্যবহার করে বাধাটি সনাক্ত করতে পারে। যখন রোবটটি চলমান থাকবে, আল্ট্রাসোনিক সংবেদক দ্বারা যদি কোনও বাধা সনাক্ত হয় তবে রোবটটি একপাশে সরবে এবং এটি চলতে থাকবে।

রোবট বডি
ডিসি মোটর
দ্য ডিসি মোটর একটি বৈদ্যুতিক মোটর এবং এটি সরাসরি বর্তমান বিদ্যুতের উপর চলে। যে কোনও বৈদ্যুতিক মোটরের অপারেশন বৈদ্যুতিন চৌম্বকবাদের উপর ভিত্তি করে। চৌম্বকীয় ক্ষেত্রটি বাহ্যিক চৌম্বকক্ষেত্রে স্থাপন করা হলে বর্তমান বহনকারী কন্ডাক্টর দ্বারা উত্পাদিত হয়, এটি কন্ডাক্টরে স্রোতের সাথে সমানুপাতিক একটি শক্তি অনুভব করবে। সাধারণভাবে, আমরা জানি যে চৌম্বকগুলি উত্তর থেকে দক্ষিণে বিপরীত মেরুচরণের আকর্ষণ এবং যদি মেরুপাতগুলি উত্তর থেকে উত্তর এবং দক্ষিণ থেকে দক্ষিণের মতো হয় তবে চুম্বকগুলি পিছপা হবে।

ডিসি মোটর
গতি উত্পাদন করার জন্য ডিসি মোটরের অভ্যন্তরীণ কনফিগারেশনটি বর্তমান বহনকারী কন্ডাক্টর এবং বহিরাগত চৌম্বক ক্ষেত্রের মধ্যে চৌম্বকীয় মিথস্ক্রিয়া সংযুক্ত করতে ডিজাইন করা হয়েছে। এতে আমরা দুটি ডিসি মোটর ব্যবহার করছি, প্রতিটি মোটরে 6v থাকে এবং মোট দুটি ডিসি মোটর 12v থাকে। দুটি ডিসি মোটর রোবোটের শরীরে স্থাপন করা হয়েছে যা আমরা নিম্নলিখিত চিত্রটিতে পর্যবেক্ষণ করতে পারি। ডিসি মোটরগুলির সাহায্যে রোবট বডিটি সরানো হয়

ডিসি মোটর সহ রোবট বডি
আরডুইনো মডিউল
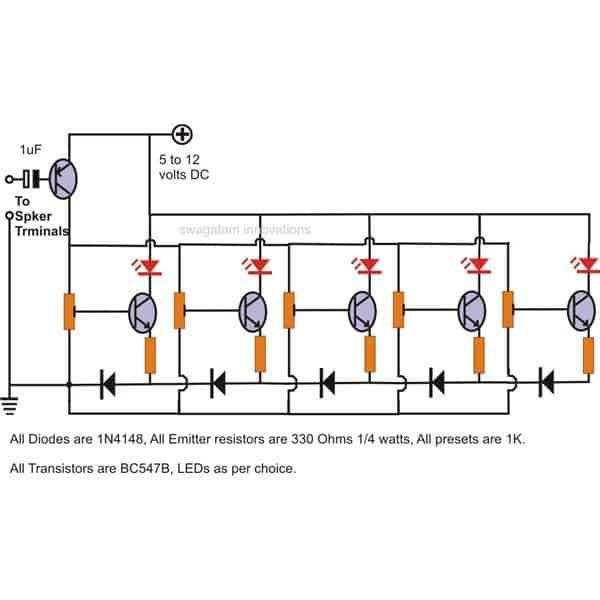
নিম্নলিখিত চিত্রটি আরডুইনো মডিউল চিত্র দেখায়। দ্য আরডুইনো মডিউল আরডুইনো কিট ব্যবহার করে বাধা এড়ানো রোবট ডিজাইনে গুরুত্বপূর্ণ ভূমিকা পালন করে। আরডুইনোর রিসিভার পিনটি অতিস্বনক সংবেদকের দ্বিতীয় পিনের সাথে সংযুক্ত এবং আরডুইনো মডিউলের 1 ম, দ্বিতীয় এবং তৃতীয় পিনটি ডিসি মোটর চালকের সাথে সংযুক্ত থাকে। সাধারণ উপাদান ক্যাপাসিটার এবং ডায়োড ব্যাটারি পাওয়ার সাপ্লাইয়ের সাহায্যে আরডুইনো মডিউলে সংযুক্ত থাকে।

আরডুইনো মডিউল
মোটর ড্রাইভার আইসি
ডিসি মোটর চালাতে মোটর ড্রাইভার আইসি ব্যবহৃত। মোটর চালকের পিনগুলি 3,6 এবং 11, 14 ডিসি মোটরটির সাথে সংযুক্ত রয়েছে। ইনপুট পিন 1 এবং 2 আরডুইনো মডিউলে সংযুক্ত থাকে এবং সক্ষম পিনটি আরডুইনোর ট্রান্সমিটার পিনের সাথে সংযুক্ত থাকে। মোটর চালকের পিন 4, 5, 12, 13 মাটির সাথে সংযুক্ত রয়েছে।

মোটর ড্রাইভার আইসি
অতিস্বনক সেন্সর
এই ধারণায় অতিস্বনক সেন্সর সামনে একটি বাধা সনাক্ত করতে ব্যবহৃত হয় এবং এটি কমান্ডটি অর্ডিনো বোর্ডে প্রেরণ করবে। ইনপুট সিগন্যালের উপর নির্ভর করে মাইক্রোকন্ট্রোলারটি রোবটকে বিকল্প দিকে অগ্রসর করতে পুনঃনির্দেশ করে।

অতিস্বনক সেন্সর
আরডুইনো রোবট বাধা এড়ানোর অ্যাপ্লিকেশনগুলি
- আরডুইনো রোবট যে কোনও পৃষ্ঠের দিকে যেতে পারে
- এটি রেফ্রিজারেটরের দেহের মতো ধাতব পৃষ্ঠের দিকে যেতে পারে।
নীচের চিত্রটি বাধা এড়ানোর জন্য আরডুইনো রোবট দেখায়

বাধা এড়ানোর জন্য আরডুইনো রোবট
সাথে একটি রোবট তৈরি করা 8051 মাইক্রোকন্ট্রোলার আমরা ধাতব আবিষ্কারক রোবট গাড়ির সম্পর্কে ব্যাখ্যা করছি are 8051 মাইক্রোকন্ট্রোলারের সাহায্যে রোবটটি তৈরি করতে প্রয়োজনীয় উপাদানগুলি হ'ল
- 8051 মাইক্রোকন্ট্রোলার
- ডিসি মোটর
- মোটর চালক
- ধাতু আবিষ্কারক
- ডিকোডার
- এনকোডার
- বোতামগুলি চাপুন
- স্ফটিক
- আরএফ ট্রান্সমিটার এবং রিসিভার
ধাতু আবিষ্কারক
দ্য ধাতু আবিষ্কারক এটি একটি কুণ্ডলী যা এক বা একাধিক ধাতব কয়েল মাটিতে ধাতব সনাক্ত করতে ব্যবহৃত হয়। ধাতব আবিষ্কারক বৈদ্যুতিন চৌম্বকীয় আনয়নের নীতিতে কাজ করে। মেটাল ডিটেক্টরটি পিসিবির মাধ্যমে রোবোটের দেহের সাথে সংযুক্ত রয়েছে যা আমরা শেষ চিত্রে লক্ষ্য করতে পারি। নিম্নলিখিত চিত্রটি বৈদ্যুতিন প্রকল্পগুলিতে ব্যবহৃত সাধারণ ধাতব আবিষ্কারক দেখায়।

ধাতু আবিষ্কারক
পুশ বোতাম
পুশ বোতামগুলি বোতামগুলি যা প্লাস্টিক এবং ধাতুর মতো শক্ত ধাতু দিয়ে তৈরি। সাধারণত ধাক্কা বোতামগুলি মাইক্রোকন্ট্রোলারে প্রোগ্রাম পুনরায় সেট করতে ব্যবহৃত হয়। নিম্নলিখিত চিত্রটি পুশ বোতামের চিত্রটি দেখায়।

বোতাম চাপা
8051 মাইক্রোকন্ট্রোলার
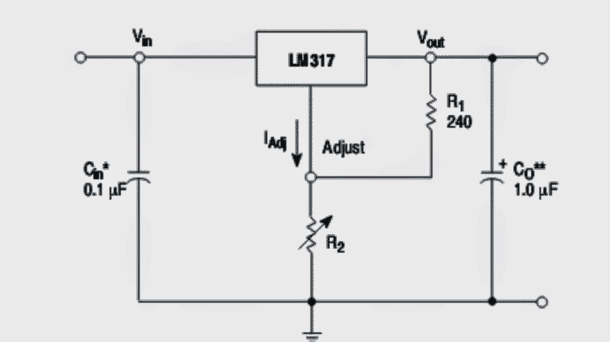
দ্য 8051 মাইক্রোকন্ট্রোলার 40 পিন নিয়ে গঠিত । মাইক্রোকন্ট্রোলারের 4 র্থ এবং 5 ম পিনটি স্ফটিক দোলকের সাথে সংযুক্ত। ভিসি পিনটি 5 ভি পাওয়ার সাপ্লাইতে দেওয়া হয় এবং গ্রাউন্ড পিনটি জমির সাথে সংযুক্ত থাকে। মাইক্রোকন্ট্রোলারের 15, 16, 18, 19 পিনগুলি HT12E এর এনকোডার আইসিতে সংযুক্ত রয়েছে। মাইক্রোকন্ট্রোলার পিনগুলি 2, 7, 8, 9 টি পুশ বোতামগুলির সাথে সংযুক্ত থাকে।
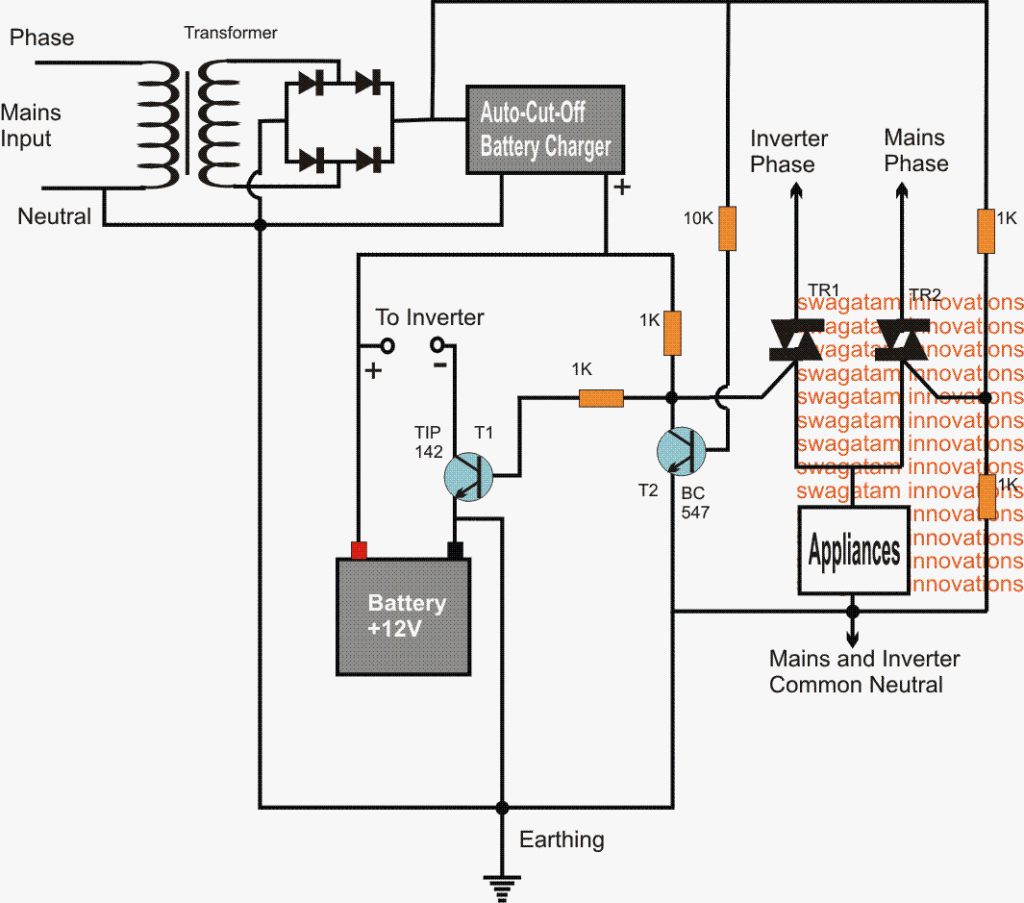
প্রতিরোধক, ক্যাপাসিটার, স্ফটিক অসিলেটর, 8051 সিরিজ মাইক্রোকন্ট্রোলার, এনকোডার এবং ইত্যাদি সমস্ত উপাদান সংযোগ করার পরে নিম্নলিখিত চিত্রটি চালু রয়েছে মুদ্রিত সার্কিট বোর্ড ।

পিসিবি সংযোগগুলি
নীচের চিত্রটি 8051 সিরিজের মাইক্রোকন্ট্রোলারের সাথে ধাতব আবিষ্কারক রোবটটি দেখায়।

8051 সিরিজের মাইক্রোকন্ট্রোলারের সাথে ধাতব সনাক্তকারী রোবট
এই নিবন্ধে আমরা সম্পর্কে আলোচনা করেছি আরডুইনো এবং 8051 মাইক্রোকন্ট্রোলার দিয়ে কীভাবে একটি রোবট তৈরি করবেন । আমি আশা করি এই নিবন্ধটি পড়ে আপনি একটি রোবট তৈরির জন্য কিছু প্রাথমিক জ্ঞান অর্জন করেছেন। আপনার যদি এই নিবন্ধ বা ইলেকট্রনিক্স এবং সম্পর্কে কোনও প্রশ্ন থাকে have যোগাযোগ প্রকল্প , দয়া করে নীচের বিভাগে মতামত নির্দ্বিধায়। আপনার জন্য এখানে প্রশ্ন, 8051 সিরিজের মাইক্রোকন্ট্রোলার কী?
।