এই পোস্টে আমরা অ্যালুমিনিয়াম পাইপ এবং বোল্ট ব্যবহার করে কোয়াডকপ্টার বডি সমাবেশের মূল বিষয়গুলি নিয়ে আলোচনা করব, নিবন্ধের পরবর্তী অংশগুলিতে আমরা একটি জটিল ড্রোন সার্কিট সম্পর্কেও আলোচনা করব যা জটিল মাইক্রোকন্ট্রোলারের উপর নির্ভর করেই একটি ছোট ড্রোন সমাবেশ উড়ানোর জন্য ব্যবহার করা যেতে পারে।
একটি কোয়াডকপ্টার হ'ল সহজতম উড়ন্ত মেশিন যা নূন্যতম পরিমাণে বায়ুবিদ্যুতের যথাযথতা এবং জটিলতার প্রয়োজন হয় এবং তাই এটি আশ্চর্যের কিছু নয় যে এটি বিভিন্ন শখবিদদের মধ্যে এটি একটি বিশাল জনপ্রিয়তা অর্জন করতে পারে যারা সফলভাবে এটি তৈরি করতে পারে .... একটি মেশিন যা তারা আসলে উড়তে পারে এবং তাদের নিজস্ব ইচ্ছায় নিয়ন্ত্রণ করুন।
কোয়াডকপ্টার ডায়নামিক্স
প্রযুক্তি এবং গতিশীলতার দিক থেকে কোয়াডকপ্টার ড্রোনটি সহজতম যে সত্যটি 4 প্রপেলার এবং একটি ভারসাম্য ফ্রেম কাঠামোর সাথে জড়িত থাকার কারণে, যা মেশিনকে তুলনামূলকভাবে ভাল ভারসাম্যহীনতার সাথে এমনকি কঠিন জলবায়ু পরিস্থিতিতেও উড়তে সক্ষম করে।
তবে সরলতার থেকে বোঝা যায় যে সিস্টেমটি প্রচলিত বিমান এবং চপ্পল মডেলগুলির মতো দক্ষ নাও হতে পারে যা গতি এবং জ্বালানী খরচ হিসাবে নিখরচায় দক্ষতার প্রদর্শনের জন্য জটিলভাবে ডিজাইন করা হয়েছে এবং অবশ্যই লোড বহন করার ক্ষমতা ... এই সমস্ত প্রয়োজনীয়ভাবে হতে পারে একটি সাধারণ কোয়াডকোপ্টার সিস্টেমের অভাব।
তবুও, শখের প্রকল্পের হিসাবে, এই মেশিনটি বেশিরভাগ উত্সাহী ব্যক্তিদের জন্য আদর্শ পছন্দ হয়ে উঠেছে যারা নিজের বাড়িতে একটি উড়ন্ত মেশিন তৈরি করতে খুব মজাদার এবং কৌতুকপূর্ণ মনে করে, যা শেষ পর্যন্ত 'শোনেন' এবং যে কোনও দিকেই উড়ে যায় ies ব্যবহারকারী এটি সরানো পছন্দ করে।
তবে, এমন কোনও নতুন খেলোয়াড়ের জন্য, যিনি প্রযুক্তিগতভাবে এতটা অবহিত নাও হতে পারেন, এই সাধারণ মেশিনটি বুঝতে খুব জটিল হয়ে উঠতে পারে, কারণ বেশিরভাগ ওয়েবসাইট জুড়ে উপস্থাপিত বেশিরভাগ সম্পর্কিত তথ্যটি কল্পিতভাবে এবং 'একটি ভাষায়' ধারণাটি আলোচনা করতে ব্যর্থ হয়েছে that কোনও সাধারণ লোকের পক্ষে উপযুক্ত হতে পারে
এই নিবন্ধটি বিশেষত যারা প্রযুক্তিগত ভাবেন না তাদের জন্য লেখা হয়েছে যারা একটি দুর্দান্ত ফ্লাইং মেশিন তৈরি করতে আগ্রহী তবে বিষয়টিকে হজম করা খুব কঠিন বলে মনে করেন।
আজকের দিনে কোয়াডকপ্টারগুলি এত সহজ
আপনি কি কখনও ভেবে দেখেছেন কেন আজকের বিশ্বে কোয়াডকপ্টার এবং ড্রোনগুলি এত সহজে তৈরি করা সম্ভব হয়েছিল এবং সম্ভবত বিদ্যুৎ ব্যবহার করা আগে অসম্ভব?
এটি মূলত লি-আয়ন ব্যাটারিগুলির বিকাশ এবং বর্ধনের কারণে। এগুলি আজ উপলব্ধ ব্যাটারির অত্যন্ত কার্যকরী ফর্ম যা ওজন অনুপাতকে চিত্তাকর্ষক শক্তি সরবরাহ করে। এর পাশাপাশি, বিএলডিসি মোটর আবিষ্কার এবং অত্যন্ত পরিশোধিত স্থায়ী চৌম্বক মোটরগুলি ড্রোনগুলি সহজেই নির্মাণযোগ্য করে তোলার ক্ষেত্রেও ভূমিকা রেখেছিল।
লি-আয়ন ব্যাটারি মোটরগুলিতে দুর্দান্ত পরিমাণে ঘূর্ণমান টর্ক সরবরাহ করতে সক্ষম যা কোয়াডকোপ্টার ইউনিটকে কয়েক সেকেন্ডের মধ্যে স্থলভাগের উচ্চতর উচ্চতায় নিয়ে যায় এবং এটি দীর্ঘ সময় ধরে বায়ু বহন করতে সক্ষম করে allows পারফরম্যান্স খুব দক্ষ এবং দরকারী।
কোয়াডকপ্টার উড়ে যায় কীভাবে
এখন আসুন সঠিক পথে ঝাঁপুন এবং একটি কোয়াডকপ্টারটি সফলভাবে উড়ানোর জন্য প্রয়োজনীয় জিনিসগুলি কী কী তা বুঝতে পারি। সফলভাবে মেশিনটিকে সহজেই উড়ানোর জন্য এখানে বেসিকগুলি:


1) মূলত মেশিনটির দৃ a় এবং শক্তিশালী শরীর প্রয়োজন তবে ওজনে অত্যন্ত হালকা। এটি ফাঁকা স্কোয়ার অ্যালুমিনিয়াম এক্সট্রুশন পাইপগুলি ব্যবহার করে বানোয়াট বা একত্রিত হতে পারে, যথাযথভাবে গর্তগুলি ড্রিল করে এবং বাদাম এবং বোল্টের সাথে ফ্রেমটি স্থির করে।
2) কাঠামোটি একটি নিখুঁত '+' বা একটি নিখুঁত 'x' আকারে হওয়া উচিত, যতক্ষণ না ক্রসিং পাইপগুলির মধ্যে কোণ 90 ডিগ্রি অবধি থাকে ততক্ষণ কোনও পার্থক্য তৈরি করে না।

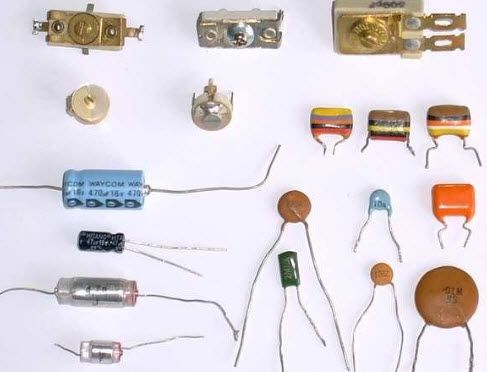
কোয়াডকপ্টার নির্মাণের জন্য প্রয়োজনীয় মৌলিক উপাদানগুলি নিম্নলিখিত চিত্রটিতে দেখা যেতে পারে:

পার্ট অ্যাসেম্বলি সিমুলেশন
উপরের দেখানো উপাদানগুলিকে একসাথে কীভাবে একত্রিত করবেন সে সম্পর্কে নীচের রুফ অ্যানিমেটেড সিমুলেশনটি দেখায়:

কোয়াডকপ্টার ফ্রেমওয়ার্ক কীভাবে তৈরি করবেন
'+' ফ্রেমের জন্য অ্যালুমিনিয়াম যথাযথভাবে কাটা এবং আকারের দ্বারা প্রস্তুত অ্যালুমিনিয়াম এক্সট্রুশন টিউবিং আকারের মাধ্যমে অধিগ্রহণ করা যেতে পারে, নীচে দেখানো হয়েছে:

ফ্রেমের আকারটি আপেক্ষিক এবং অতএব গুরুত্বপূর্ণ নয়, আপনি মোটরগুলির সাথে পৃথক পৃথকভাবে লাগানো একটি প্রশস্ত ফ্রেম তৈরি করতে পারেন বা একটি কমপ্যাক্ট ফ্রেম কাঠামো তৈরি করতে পারেন যেখানে মোটরগুলি খুব বেশি বিস্তৃত নয় ... যদিও এটি অবশ্যই নিশ্চিত করা উচিত যে প্রোপেলাররা আরও ভাল ভারসাম্য এবং ভারসাম্য রক্ষার জন্য একে অপরের কাছ থেকে বেশ দূরে রয়েছেন।
3) ফ্রেম বাহুগুলি একে অপরের সাথে মিলিত হয়ে ক্রস করে কেন্দ্রীয় অংশে '+' ফ্রেম কাঠামোটি অবশ্যই একটি বর্গাকার প্ল্যাটফর্মের সাথে লাগানো উচিত। এটি সহজেই সমস্ত প্রয়োজনীয় ইলেকট্রনিক্স এবং তারের সংযোজন করার জন্য উপযুক্তভাবে পালিশযুক্ত একটি ভাল পালিশযুক্ত অ্যালুমিনিয়াম প্লেট হতে পারে।
সুতরাং এই কেন্দ্রীয় প্লেট বা প্ল্যাটফর্মটি মূলত সিস্টেমটির ইলেক্ট্রনিক্স ইনস্টল এবং আবাসনের জন্য প্রয়োজনীয় যা শেষ পর্যন্ত আপনার কোয়াডকপ্টার নিয়ন্ত্রণের জন্য দায়ী।
4) উপরের কাঠামোটি শেষ হয়ে গেলে মোটরগুলি ক্রস বারগুলির শেষ প্রান্তে ঠিক করতে হবে, উপরের চিত্রগুলিতে দেখানো হয়েছে।
5) এটি বলাই বাহুল্য যে সমস্ত ফিটিংয়ের কাজটি অত্যন্ত নির্ভুলতার সাথে করা উচিত, এবং নিখুঁত সারিবদ্ধতা, এটি কাজের জন্য অভিজ্ঞ মনগড়া সংস্থার প্রয়োজন হতে পারে।
যেহেতু ডিজাইনের সমস্ত কিছু জোড়াতে রয়েছে তাই উপাদানগুলি যথাযথভাবে সারিবদ্ধ করা খুব বেশি কঠিন হবে না, এটি যতটা সম্ভব সাদৃশ্যযুক্ত জোড়গুলির আকার এবং ফিট করে তোলা, যা ঘুরেফিরে সর্বাধিক মাত্রার ভারসাম্য, ভারসাম্য এবং সমন্বয় নিশ্চিত করে সিস্টেমের জন্য।
ফ্রেমওয়ার্কটি তৈরি হয়ে গেলে, এটি মোটরগুলির সাথে বৈদ্যুতিন সার্কিটগুলি একীভূত করার সময় time প্রদত্ত সার্কিট ম্যানুয়ালটিতে প্রদত্ত নির্দেশাবলী অনুযায়ী এটি করা দরকার।
সার্কিট বোর্ডগুলি যথাযথভাবে আবাসন বা প্লেটের ওপরে কেন্দ্রীয় প্লেটের নীচের দিকে লাগানো যেতে পারে, আবার শক্তভাবে এটি আবদ্ধ করার জন্য উপযুক্ত ক্যাবিনেটের সাথে।

প্রোপেলারদের আবর্তনশীল দিক বোঝা
ভারসাম্যযুক্ত উত্তোলনের জন্য মোটর চালকগুলির ঘূর্ণনের দিকটি বিশ্লেষণ:
উপরের অ্যানিমেটেড সিমুলেশনটি উল্লেখ করে মোটর চালকগুলির ঘূর্ণনের দিকটি নিম্নলিখিত পদ্ধতিতে প্রান্তিককরণ করতে হবে:
এটি কেবল এ জাতীয় হওয়া দরকার যে একটি রডের প্রান্তের মোটরগুলি একই রডের মোটর দিকের সাথে একই তবে ভিন্ন হওয়া উচিত, যার অর্থ যদি একটি রডটি মোটরকে ঘড়ির কাঁটার দিকে ঘুরতে থাকে তবে তার পরে অন্য পরিপূরকগুলির শেষের মোটরগুলি থাকে ing অ্যান্টি-ক্লকওয়াসে স্পিন করতে রডটি টিউন করা আবশ্যক। অভিমুখ.
মোটরগুলির ভারসাম্যহীন নিশ্চিতকরণের জন্য মোটরগুলিকে অর্পণ করার প্রয়োজন হতে পারে এর সঠিকভাবে পাল্টা অভিনয়ের গতিবিধি বুঝতে দয়া করে উপরের সিমুলেশনটি দেখুন refer
মোটরগুলির গতি নিয়ন্ত্রণ করে কীভাবে কোয়াডকপটারের দিকটি নিয়ন্ত্রণ করতে হবে।
হ্যাঁ, কোয়াডকপ্টারটির উড়ন্ত দিকটি আপনার নিজের ইচ্ছা অনুযায়ী টুইট এবং নিয়ন্ত্রণ করা যেতে পারে এবং কেবল সংশ্লিষ্ট মোটরগুলিতে বিভিন্ন গতি (আরপিএম) প্রয়োগ করে।
নিম্নলিখিত চিত্রগুলি দেখায় যে মেশিনে কোনও পছন্দসই উড়ন্ত দিক অর্জন ও সম্পাদনের জন্য কীভাবে বেসিক স্পিড ট্রান্সমিশন প্রাসঙ্গিক মোটরগুলিতে প্রয়োগ করা যেতে পারে:




উপরের চিত্রগুলিতে উল্লিখিত হিসাবে, মোটরগুলির একটি সেটের গতি যথাযথভাবে হ্রাস করে, বা মোটরগুলির বিপরীত সেটটির গতি বাড়াতে, বা নিজস্ব পছন্দ অনুসারে গতিটি টুইট করে কোয়াডকপ্টারটি বাতাসে যাতায়াত করতে পারে কাঙ্ক্ষিত নির্দিষ্ট দিক
উপরের চিত্রগুলি মূল দিকগুলি নির্দেশ করে যেমন ফরোয়ার্ড, বিপরীত, ডান, বাম ইত্যাদি ... তবে অন্য কোনও বিজোড় দিকটি প্রাসঙ্গিক মোটরের গতি যথাযথভাবে সামঞ্জস্য করে দক্ষতার সাথে প্রয়োগ করা যেতে পারে বা কেবল একটি একক মোটর হতে পারে।
উদাহরণস্বরূপ, মেশিনটিকে এন / ডাব্লু দিকের দিকে উড়তে বাধ্য করার জন্য, কেবল এস / ই মোটরের গতি বাড়ানো যেতে পারে এবং মেশিনকে এন / ই অভিমুখে উড়তে সক্ষম করার জন্য, এস / এর গতি ডাব্লু মোটর বাড়ানো যেতে পারে ... ইত্যাদি। কোয়াডকপ্টারটির সম্পূর্ণ নিয়ন্ত্রণ ব্যবহারকারী দ্বারা অর্জনযোগ্য এবং আয়ত্তকৃত না হওয়া পর্যন্ত এটি অনুশীলন করা দরকার।
একটি প্রাকটিক্যাল কোয়াডকোপার ডিজাইন করা
এখন পর্যন্ত আমরা ড্রোন বডি এবং হার্ডওয়্যার এর প্রাথমিক নির্মাণ সম্পর্কে শিখেছি, এখন আসুন শিখি কীভাবে খুব সাধারণ উপাদান ব্যবহার করে দ্রুত এবং সস্তায় একটি কোয়াডকপ্টার বা একটি ড্রোন সার্কিট তৈরি করা যায়। আমার আগের একটি পোস্টে আমরা শিখেছি কিভাবে মাইক্রোকন্ট্রোলার ব্যবহার না করে তুলনামূলকভাবে জটিল এবং অতএব দক্ষ দক্ষ কোয়াডকপ্টার ফ্লাইং মেশিন তৈরি করা যায়, আরও তথ্যের জন্য আপনি নীচের পোস্টগুলিতে যেতে চান:
এমসিইউ ছাড়াই রিমোট কন্ট্রোল সার্কিট | বৈদ্যুতিন সার্কিট
বর্তমান নিবন্ধে আমরা ব্রাশহীন মোটরগুলি অপসারণ করে এবং ব্রাশযুক্ত মোটরগুলির সাথে এটি প্রতিস্থাপন করে ফলস্বরূপ জটিলটি থেকে মুক্তি পাওয়া সম্ভব করার মাধ্যমে উপরের নকশাটিকে আরও সহজ করার চেষ্টা করি article বিএলডিসির ড্রাইভার সার্কিট মডিউল ।
যেহেতু কোয়াডকপটারের যান্ত্রিক নির্মাণের বিশদটি ইতিমধ্যে উপরে বিস্তারিত আলোচনা করা হয়েছে, তাই আমরা কেবলমাত্র সার্কিট ডিজাইনের বিভাগটি নিয়ে কাজ করব এবং প্রস্তাবিত সহজ ড্রোন সার্কিটটি উড়ানোর জন্য এটি কীভাবে তৈরি করা যেতে পারে তা শিখব।
পূর্বে উল্লিখিত হিসাবে এই সাধারণ কোয়াডকপ্টারটির নীচের উদাহরণের চিত্রটিতে প্রদর্শিত কেবলমাত্র বেসিক আরএফ রিমোট কন্ট্রোল মডিউলগুলির প্রয়োজন:

তোমার দরকার হবে এই আরএফ মডিউল কিনতে যে কোনও অনলাইন স্টোর থেকে বা আপনার স্থানীয় বৈদ্যুতিন খুচরা ব্যবসায়ী থেকে:
উপরে বর্ণিত ব্যতীত আরএফ রিমোটস মডিউলগুলি 4 স্থায়ী চৌম্বক ব্রাশ মোটর এছাড়াও প্রয়োজন হবে যা আসলে ড্রোন মেশিনের হৃদয় গঠন করে। এটি প্রদত্ত বিবরণ সহ নিম্নলিখিত চিত্রটিতে নির্দিষ্ট হিসাবে বা প্রয়োজনীয় ব্যবহারকারীর নির্দিষ্টকরণের মতো অনুরূপ অন্য কোনও হিসাবে নির্দিষ্ট করা যেতে পারে:

মোটরের বৈদ্যুতিক বিশেষ উল্লেখ:
- 6 ভি = অপারেটিং ভোল্টেজ (শিখর 12 ভি)
- 200mA = অপারেটিং কারেন্ট
- 10,000 = আরপিএম
যন্ত্রাংশের তালিকা
- 1 কে, 10 কে 1/4 ওয়াট = 1 টি
- 1uF / 25V ক্যাপাসিটার = 1no
- প্রিসেট 10 কে বা 5 কে = 1no
- আরএক্স = 5 ওয়াটের ওয়্যারওয়াউন্ড রোধকারী, পরীক্ষার মাধ্যমে নিশ্চিত হওয়া মান।
- আইসি 555 = 1no
- 1N4148 ডায়োডস = 2 নম্বর
- আইআরএফ 9540 মোসফেট = 1no
- 6 ভি মোটর ব্রাশড প্রকার = 4 নোট
- নমনীয় তার, সোল্ডার, ফ্লাক্স ইত্যাদি
- উপরোক্ত অংশগুলি একত্র করার জন্য সাধারণ উদ্দেশ্যে পিসিবি
- 4 চ্যানেল আরএফ রিমোট কন্ট্রোল মডিউল, সম্পর্কিত চিত্রগুলিতে দেখানো হয়েছে।
- নিবন্ধে বর্ণিত অ্যালুমিনিয়াম চ্যানেল, স্ক্রু, বাদাম, প্লেট ইত্যাদি।
- ব্যাটারি নীচে প্রদর্শিত হিসাবে:

মোটরগুলির সাথে রিমোট কন্ট্রোল রিসিভারটি কীভাবে কনফিগার করবেন
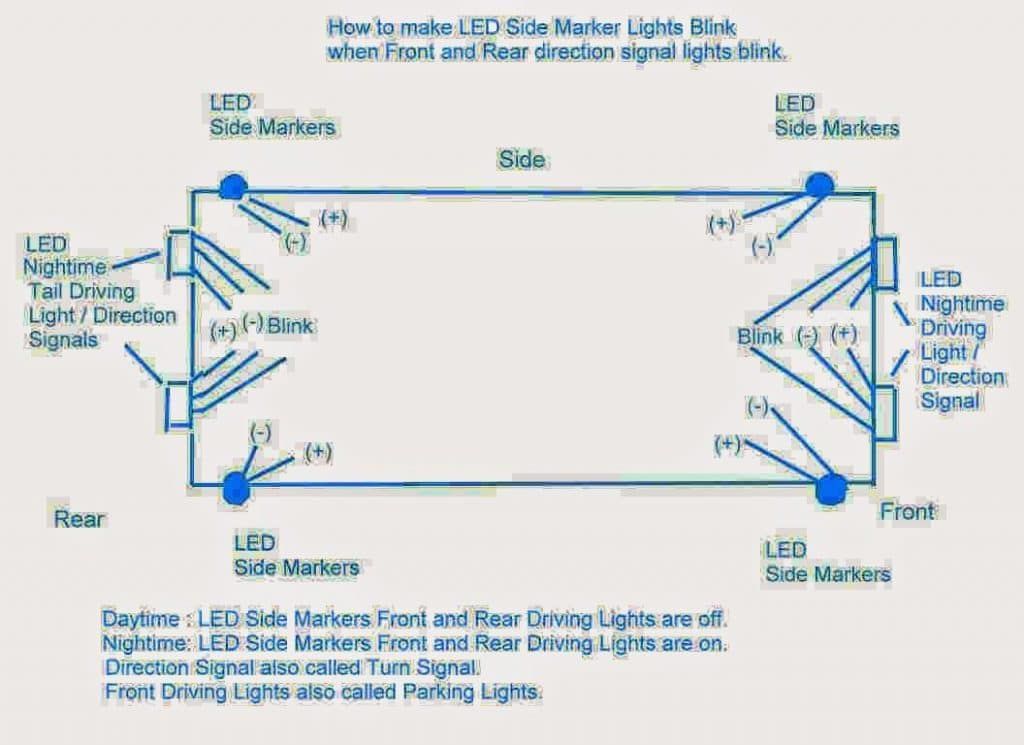
কোয়াডকোটার মোটরগুলির সাথে কীভাবে রিমোট কন্ট্রোল রিসিভারটি কনফিগার করতে হবে তা বোঝার আগে, প্রয়োজনীয় বাম, ডান, সামনের এবং পিছনের গতিগুলি উত্পন্ন করার জন্য মোটর গতি কীভাবে সামঞ্জস্য করা বা প্রান্তিককরণ করা হয় তা শিখতে গুরুত্বপূর্ণ হবে।
প্রাথমিকভাবে দুটি চতুর্থাংশ চলাচল করতে সক্ষম হতে পারে, যা '+' এবং 'এক্স'মোডে রয়েছে। আমাদের নকশায় আমরা আমাদের ড্রোনটির গতি রক্ষার জন্য বেসিক '+' মোড নিযুক্ত করি, যেমনটি নিম্নলিখিত চিত্রটিতে নির্দেশিত হয়েছে:

উপরের চিত্রটি উল্লেখ করে আমরা বুঝতে পারি যে ড্রোনটিতে কাঙ্ক্ষিত দিকনির্দেশক কসরত বাস্তবায়নের জন্য আমাদের যথাযথভাবে প্রাসঙ্গিক মোটরের গতি বাড়াতে হবে।
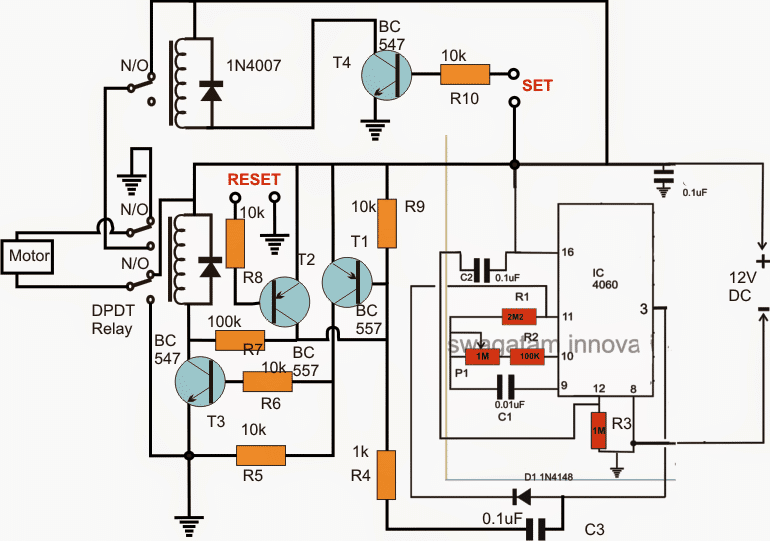
নিম্নলিখিত ওয়্যারিং ডায়াগ্রাম অনুযায়ী রিমোট কন্ট্রোল রিলে কনফিগার করে গতির এই বৃদ্ধিটি প্রয়োগ করা যেতে পারে। নীচের চিত্রে আমরা একটি দেখতে পাচ্ছি আইসি 555 পিডব্লিউএম সার্কিট 6 রিলে রিমোট কন্ট্রোল রিসিভার মডিউলের 4 টি রিলে সাথে তারযুক্ত (1 রিলে অব্যবহৃত এবং সহজেই স্থান এবং ওজনকে সরিয়ে দেওয়া যেতে পারে)।
পিডব্লিউএম সামঞ্জস্য করা
চিত্রটিতে দেখা যায়, পিডব্লিউএম ফিডটি রিলে সম্পর্কিত সমস্ত এন / সি যোগাযোগের সাথে সংযুক্ত রয়েছে, যা বোঝা যায় যে সাধারণত এই চতুর্থাংশ এই ইউনিফর্ম এবং সমান পিডব্লিউএম ফিডের মাধ্যমে ঘুরে বেড়াবে, যার ডিউটি চক্রটি প্রাথমিকভাবে এমনভাবে সামঞ্জস্য করা হতে পারে কোয়াডকপ্টারটি নির্দিষ্ট নির্দিষ্ট পরিমাণে চাপ এবং উচ্চতা অর্জন করতে সক্ষম হয়।
এটি প্রদর্শিত পিডব্লিউএম পটকে যথাযথভাবে সামঞ্জস্য করে পরীক্ষা করা যেতে পারে।
রিলে পরিচিতিগুলি কীভাবে কনফিগার করবেন
রিলেগুলির N / O পরিচিতিগুলি ইতিবাচক সরবরাহের সাথে সরাসরি তারের সাথে দেখা যায়, সুতরাং যখনই রিমোট ট্রান্সমিটার হ্যান্ডসেটটিতে কোনও প্রাসঙ্গিক বোতাম টিপানো হয় তখন সংশ্লিষ্ট রিলে রিসিভার মডিউলে সক্রিয় করা হয়, যার ফলে প্রাসঙ্গিক মোটরটি সক্ষম হয় ব্যাটারি থেকে সম্পূর্ণ 12 ভি সরবরাহ।
উপরের অপারেশনটি সক্রিয় মোটরটিকে মোটরগুলির বাকী মোটরের চেয়ে আরও বেশি গতি অর্জন করতে দেয় যা কোয়াডকপ্টারটিকে নির্ধারিত দিকে এগিয়ে যেতে দেয়।
রিমোট বোতামটি প্রকাশের সাথে সাথেই ড্রোনটি তত্ক্ষণাত বন্ধ হয়ে যায় এবং ধ্রুবক মোডে ঘোরাতে থাকে।
একইভাবে, দূরবর্তী হ্যান্ডসেটে অন্যান্য নির্ধারিত বোতামগুলি টিপে সাধারণভাবে অন্যান্য নির্দেশমূলক গতিগুলি অর্জন করা যায়।
শীর্ষস্থানীয় রিলে মেশিনের নিরাপদ অবতরণ নিশ্চিত করার জন্য এটি প্রদর্শিত রিলে N / O যোগাযোগের সাথে সিরিজে একটি বর্তমান ড্রপিং রোধ যুক্ত করে সম্পন্ন করা হয়।
এই প্রতিরোধকের মানটি অবশ্যই কিছু পরীক্ষা-নিরীক্ষার সাথে গণনা করতে হবে যে কোয়াডকপ্টারটি যখনই এই প্রতিরোধকটিকে সংযুক্ত রিলে টগল করা হয় তখন মাটির কয়েক ফুট উপরে মাটির চারপাশে ঘোরাফেরা করে।
বর্তনী চিত্র

প্রদর্শিত রিলেগুলি আরএফ মডিউল রিসিভারের অংশ, যার পরিচিতিগুলি প্রাথমিকভাবে সংযুক্ত (ডিফল্টরূপে ফাঁকা) এবং উপরের চিত্রটিতে নির্দেশিত অনুযায়ী তারযুক্ত হওয়া দরকার।
আরএফ রিমোট রিসিভারটি উপরের দেখানো লেআউট অনুযায়ী প্রাসঙ্গিক মোটর এবং ব্যাটারি দিয়ে ওয়্যার্ডযুক্ত কোয়াডকোপটারের অভ্যন্তরে এবং এর রিলে ইনস্টল করার কথা।
আপনি কয়েকটি সংযোগকারী (সবুজ বর্ণের) দেখতে পাচ্ছেন যা অকারণে ড্রোনটিতে ওজন যুক্ত করতে পারে। ওজন কমাতে আপনি এগুলি সমস্ত সরাতে পারেন, এবং সোনার্ডিংয়ের মাধ্যমে প্রাসঙ্গিক তারগুলি সরাসরি পিসিবির সাথে সংযুক্ত করতে পারেন।
ড্রোন কীভাবে নড়াচড়া করে:
উপরের আলোচনায় বর্ণিত হিসাবে, যখন কোনও নির্দিষ্ট রিমোট বোতাম টিপানো হয়, তখন এটি কোয়াডকোপ্টার মডিউলটির সংশ্লিষ্ট রিলেটিকে প্রাসঙ্গিক মোটরটিকে দ্রুত গতিতে চালিত করে।
এই অপারেশনটি পাল্টে মেশিনটিকে মোটরটির বিপরীত দিকে যেতে বাধ্য করে যা দ্রুত আরপিএমের দিকে ঘোরানোর জন্য স্যুইচ করা হচ্ছে।
সুতরাং উদাহরণস্বরূপ, দক্ষিণ মোটরটির গতি বাড়ানো মেশিনকে উত্তরের দিকে নিয়ে যায়, উত্তর মোটর বাড়িয়ে তোলে এটি দক্ষিণে অগ্রসর হয়, একইভাবে পূর্ব মোটরের গতি বৃদ্ধি পাওয়ায় এটি পশ্চিম দিকে চলে যায় এবং তদ্বিপরীত হয়।
মজার বিষয় হল, দক্ষিণ / পূর্বের মোটরগুলি বাড়ানো কোয়াডকপ্টারটিকে উত্তর / পশ্চিমের তির্যক মোডের দিকে এগিয়ে যেতে সক্ষম করে .... ইত্যাদি।
উপরের প্রো এবং কনস সরল কউডকপ্টার রিমোট কন্ট্রোল সার্কিটের ব্যাখ্যা করেছেন।
পেশাদাররা
- তুলনামূলকভাবে নতুন শখের দ্বারা এমনকি সস্তা এবং সহজেই তৈরি।
- জটিল জোস্টস্টিক অপারেশনগুলির প্রয়োজন হয় না।
- একটি একক 6 চ্যানেল রিমোট কন্ট্রোল মডিউল ব্যবহার করে নিয়ন্ত্রণ করা যায়
কনস
- ব্রাশ মোটরের সাথে জড়িত থাকার কারণে ব্যাটারি ব্যাকআপের ক্ষেত্রে কম দক্ষ
- দিকনির্দেশক গতি ধ্রুবক এবং রিমোট কন্ট্রোল হ্যান্ডসেটের মাধ্যমে বৈচিত্রময় হতে পারে না
- বোতামগুলি স্যুইচ করার সময় চালচলনটি কিছুটা ঝাঁকুনির চেয়ে মসৃণ নাও হতে পারে।
পূর্ববর্তী: ফোর্স সেন্সিং প্রতিরোধক ব্যাখ্যা পরবর্তী: ক্যাপাসিটিভ ভোল্টেজ বিভাজক