এই পোস্টে আমরা শিখতে যাচ্ছি সার্ভো মোটর কী, এটি কীভাবে কাজ করে, মাইক্রোকন্ট্রোলারের সাথে ইন্টারফেস কীভাবে এবং অন্যান্য মোটর থেকে কীভাবে এই মোটরকে বিশেষ করে তোলে।
ইলেক্ট্রনিক্স উত্সাহী হয়ে আমরা বিভিন্ন ধরণের মোটর দেখতে পেতাম, এখানে আমরা সার্ভো মোটর নামক বিশেষ ধরণের মোটরটি দেখে নিই।
সার্ভো মোটর কী?
সার্ভো মোটর বা কেবল সরো একটি বিশেষ ধরণের মোটর যা অবস্থান, ত্বরণ এবং বেগের উপর নির্ভুল নিয়ন্ত্রণের জন্য ডিজাইন করা হয়েছে। অন্যান্য সমস্ত ধরণের মোটরের থেকে পৃথক, सर्वो কেবল 180 ডিগ্রি দ্বি-দিকনির্দেশক ঘোরানো যায়। এটিতে মেকানিকাল গিয়ারস এবং স্টপার রয়েছে যা সার্ডোর কৌণিক ঘূর্ণন সীমাবদ্ধ করে।
সাধারণ সার্ভো মোটর:

সার্ভো মোটরগুলি রোবোটিকস, সিসিটিভি ক্যামেরা, আরসি গাড়ি, নৌকো, খেলনা বিমান ইত্যাদিতে ব্যবহৃত হয় সার্ভগুলি ব্যবহৃত হয় যেখানে আমাদের কোনও ঘূর্ণন গতি অবিরত করার প্রয়োজন নেই, তবে একটি নির্দিষ্ট অবস্থানে লক করুন বা চলনীয় কৌণিক সীমাতে নিয়ন্ত্রিত বেগ সহ কিছু বোঝা সরিয়ে ফেলুন।
সার্ভো কেবল অন্য ধরণের মতো মোটর নয়, তবে এটি মডিউল, যা একটি সাধারণ ডিসি / এসি মোটর, গিয়ারগুলির একটি গ্রুপ, নিয়ন্ত্রণ ইলেকট্রনিক্স এবং একটি প্রতিক্রিয়া সিস্টেমের সংমিশ্রণ করে। আসুন প্রতিটি বর্ণিত পর্যায়টি বিস্তারিতভাবে দেখি।
ডিসি / এসি মোটর যা একটি সার্ডো মডিউলে নিযুক্ত করা হয় ব্রাশহীন বা ব্রাশ মোটর হতে পারে, বেশিরভাগ শখের উপরে সার্ভো ডিসি মোটর ব্যবহৃত হয় এবং এসি মোটর শিল্প অ্যাপ্লিকেশনগুলিতে ব্যবহৃত হয়। মোটরটি সার্ডোকে ঘোরানো ইনপুট দেয়। মোটরটি সার্ডোর অভ্যন্তরে কয়েক শতাধিক আরপিএম এ ঘোরে এবং আউটপুট আবর্তন তার আরপিএমের প্রায় 50 বা তারও বেশি গুণ কম।
পরবর্তী পর্যায়ে গিয়ার সমাবেশ, যা কৌণিক আবর্তন এবং সার্ডোর গতি নিয়ন্ত্রণ করে। গিয়ারটি ভারী বোঝা কতটা নির্ভর করে তার উপর নির্ভর করে প্লাস্টিক বা ধাতু থেকে তৈরি করা যেতে পারে। সাধারণত ডিসি মোটরগুলি উচ্চ আরপিএমে চালিত হয় এবং নিম্ন গ্লাস গিয়ার অ্যাসেমব্লিক অতিরিক্ত আরপিএমকে টর্কে রূপান্তরিত করে। এইভাবে একটি ছোট মোটর একটি বিশাল বোঝা পরিচালনা করতে পারে।
পরবর্তী পর্যায়ে নিয়ন্ত্রণ ইলেকট্রনিক্স যা মোটের ঘূর্ণন নিয়ন্ত্রণের জন্য এমওএসএফইটি এবং আইসি গঠন করে। অ্যাক্টুয়েটারের বর্তমান অবস্থান ট্র্যাক করার জন্য একটি প্রতিক্রিয়া সিস্টেম সর্বদা servo মোটরে উপস্থিত থাকে।
সার্ভগুলিতে সাধারণত একটি প্রতিক্রিয়া উপাদান হ'ল একটি পেন্টিয়োমিটার, যা সরাসরি ঘূর্ণনকারী অ্যাকিউউটারের সাথে সংযুক্ত থাকে। পোটেনিওমিটারটি ভোল্টেজ বিভাজক হিসাবে কাজ করে যা নিয়ন্ত্রণ ইলেকট্রনিক্সকে খাওয়ানো হয়। এই প্রতিক্রিয়াটি মোটরকে দেওয়া পাওয়ারের পরিমাণ নির্ধারণ করতে ইলেক্ট্রনিক্সকে নিয়ন্ত্রণ করতে সহায়তা করে।
কোনও বাহ্যিক বাহিনী যদি ঝামেলা করার চেষ্টা করে তবে স্থির অবস্থানে থাকা একটি সার্ভো মোটর তার বর্তমান অবস্থান থেকে অনিচ্ছুক পদক্ষেপ নিতে হবে। প্রতিক্রিয়া সিস্টেমটি বর্তমান অবস্থান পর্যবেক্ষণ করে এবং বাইরের অশান্তির বিরুদ্ধে মোটরকে শক্তি দেয়।
সার্ভো যখন তার অ্যাকিউউটরটি চালাচ্ছে তখন উপরের দৃশ্যটি একই রকম। নিয়ন্ত্রণ ব্যবস্থা বাহ্যিক শক্তিকে ক্ষতিপূরণ দেবে এবং নির্ধারিত গতিতে চলে যাবে।
আপনি এখনই সার্ভো মোটর এবং এর কার্যকারিতা প্রক্রিয়া সম্পর্কে বেশ কিছুটা জানেন। মাইক্রোকন্ট্রোলার ব্যবহার করে কীভাবে সার্ভো মোটরগুলি নিয়ন্ত্রণ করতে হয় তা দেখা যাক।
সার্ভো মোটরগুলির 3 টি টার্মিনাল রয়েছে অন্যান্য মোটরগুলির বিপরীতে 2 টার্মিনাল রয়েছে, দুটি সরবরাহের জন্য (5 ভি নামমাত্র) এবং একটি নিয়ন্ত্রণ সংকেতের জন্য। টার্মিনালগুলির সহজে সনাক্তকরণের জন্য তারগুলি বর্ণযুক্ত।
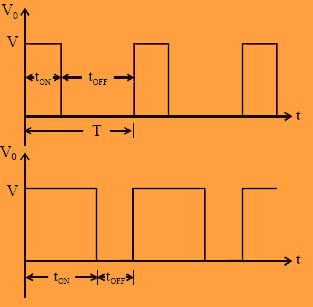
Servos এর নিয়ন্ত্রণ সংকেতগুলি 50Hz ফ্রিকোয়েন্সিতে PWM। সিগন্যালের নাড়ি প্রস্থটি ভারপ্রাপ্ত হাতের অবস্থান নির্ধারণ করে। একটি সাধারণ শখ সার্ভো মোটর 1 থেকে 2 মিলিসেকেন্ড নাড়ের প্রস্থে চালিত হয়।
1 এমএস পালস প্রস্থ নিয়ন্ত্রণ সংকেত প্রয়োগ করা হলে অ্যাকিউউটরকে 0 ডিগ্রি অবস্থানে রাখবে। 2 এমএস পালসের প্রস্থ নিয়ন্ত্রণ সংকেত প্রয়োগ করা হলে অ্যাকিউউটরকে 180 ডিগ্রি পজিশনে রাখবে। 1-2 এমএসের মধ্যে সংকেত প্রয়োগ করা অ্যাকিউউটরকে 0-180 ডিগ্রি কোণের মধ্যে রাখবে। নীচের চিত্রটি দিয়ে এটি আরও ভালভাবে বোঝা যায়।

এতক্ষণে আপনি বুঝতে পেরেছেন যে কীভাবে কোনও सर्वोটি পালস প্রস্থের মড্যুলেশন (পিডাব্লুএম) দ্বারা নিয়ন্ত্রণ করা হয়।
এবার আসুন কীভাবে আরডুইনো দিয়ে একটি সার্ভো মোটর ইন্টারফেস করা যায় তা শিখি।
বর্তনী চিত্র:

তারেরগুলি সহজ এবং স্ব-ব্যাখ্যামূলক। আপনি যদি একটি বড় সার্ভো মোটর ব্যবহার করছেন তবে আপনার বাহ্যিক বিদ্যুৎ সরবরাহের প্রয়োজন। আপনি যদি আরডুইনো পাওয়ারের সরবরাহ থেকে পাওয়ার চেষ্টা করেন তবে আপনি কম্পিউটারে ইউএসবি পোর্টকে ওভারলোডিং শেষ করবেন।
আপনার যদি সারো মিল রয়েছে যা নিবন্ধের শুরুতে চিত্রিত হয়েছে, তবে আপনি এটিকে আরডুইনো 5 ভি সরবরাহ থেকে পাওয়ার করতে পারেন, যা লেখকের প্রোটোটাইপে প্রদর্শিত হয়েছে shown
লেখকের প্রোটোটাইপ:

আরডুইনো এটি পরিচালনা করার জন্য সার্বো গ্রন্থাগার প্রয়োজন, এটি আমাদের কাজ সহজ করে তোলে এবং এটি ইতিমধ্যে আরডুইনো আইডিইতে রয়েছে।
কার্যক্রম:
//--------Program developed by R.Girish--------//
#include
Servo motor
int pos = 0
int t=10
void setup()
{
motor.attach(7)
}
void loop()
{
A:
pos=pos+1
motor.write(pos)
delay(t)
if(pos==180) { goto B}
goto A
B:
pos=pos-1
motor.write(pos)
delay(t)
if(pos==0) { goto A}
goto B
}
//--------Program developed by R.Girish--------//
উপরের প্রোগ্রামটি অ্যাকিউউটারকে 0 থেকে 180 ডিগ্রী ডান এবং 180 থেকে 0 ডিগ্রি বামে এবং চক্র পুনরাবৃত্তি করবে। এই সার্ডোটি পরীক্ষা করার জন্য একটি সহজ প্রোগ্রাম যা আপনার নিজের পছন্দসই অ্যাপ্লিকেশনগুলির জন্য আপনার নিজের কোড লিখতে হতে পারে।
পূর্ববর্তী: দুটি পাইপ জল পাম্প ভালভ কন্ট্রোলার সার্কিট পরবর্তী: মোটরসাইকেলের ভোল্টেজ নিয়ন্ত্রক তারের বোঝা